
-

Nhà cung cấp giải pháp tự động hóa vi mô–Công ty TNHH Robot KGG Thượng Hải
Công ty TNHH Robot KGG Thượng Hải là nhà cung cấp vít me bi mini, bộ điều khiển đơn trục và bộ điều khiển đa trục chất lượng cao trong nước. Đây là một doanh nghiệp sản xuất và đổi mới công nghệ với các dịch vụ thiết kế và phát triển, sản xuất và bán hàng độc lập, và dịch vụ kỹ thuật...Đọc thêm -

Nguyên lý hoạt động và ứng dụng của động cơ bước trục vít bi
Nguyên lý cơ bản của động cơ bước trục vít bi Động cơ bước trục vít bi sử dụng vít và đai ốc để khớp nối, và một số phương pháp được áp dụng để ngăn vít và đai ốc quay tương đối với nhau, giúp vít di chuyển theo trục. Nhìn chung, có hai cách để đạt được điều này...Đọc thêm -

Ba phương pháp lắp đặt cơ bản cho vít me bi
Trục vít bi, thuộc một trong những phân loại vòng bi máy công cụ, là sản phẩm vòng bi máy công cụ lý tưởng có thể chuyển đổi chuyển động quay thành chuyển động thẳng. Trục vít bi bao gồm vít, đai ốc, thiết bị đảo chiều và bi, và có các đặc điểm là độ chính xác cao, khả năng đảo chiều và...Đọc thêm -
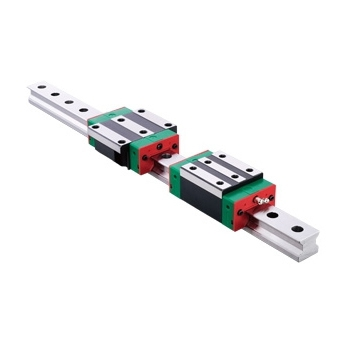
Tính năng của thanh dẫn hướng tuyến tính con lăn
Con lăn dẫn hướng tuyến tính là một thanh dẫn hướng lăn tuyến tính chính xác, có khả năng chịu lực cao và độ cứng cao. Trọng lượng của máy và chi phí của cơ cấu truyền động và công suất có thể giảm trong trường hợp tần suất chuyển động lặp lại cao, bắt đầu và dừng chuyển động qua lại. R...Đọc thêm -

Vít bi chính xác KGG trong ứng dụng máy tiện
Một loại bộ phận truyền động thường được sử dụng trong ngành công nghiệp máy công cụ, đó là trục vít bi. Trục vít bi bao gồm trục vít, đai ốc và bi, có chức năng chuyển đổi chuyển động quay thành chuyển động thẳng, và trục vít bi được sử dụng rộng rãi trong nhiều thiết bị công nghiệp. Vít bi chính xác KGG...Đọc thêm -
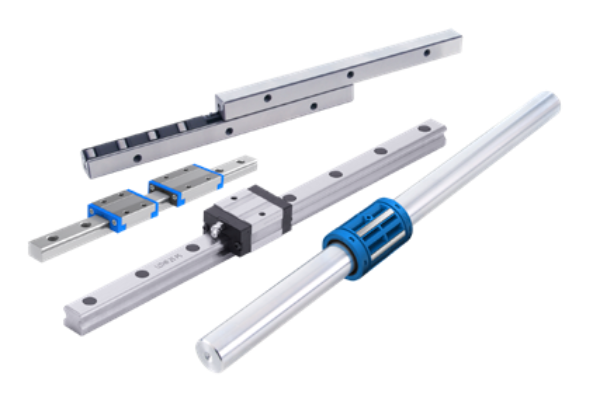
Giải pháp truyền động và chuyển động tuyến tính
Đi đúng hướng Chuyên môn kỹ thuật đáng tin cậy Chúng tôi hoạt động trong nhiều ngành công nghiệp khác nhau, nơi các giải pháp của chúng tôi cung cấp chức năng chính cho các yêu cầu quan trọng của doanh nghiệp...Đọc thêm -

Cấu trúc của nền tảng căn chỉnh
Nền tảng căn chỉnh là sự kết hợp của hai đối tượng làm việc sử dụng bộ phận chuyển động XY cộng với hệ thống lái vi mô góc θ. Để hiểu rõ hơn về nền tảng căn chỉnh, các kỹ sư của KGG Shanghai Ditz sẽ giải thích cấu trúc của...Đọc thêm -

Mời bạn tham dự Triển lãm năm 2021 của chúng tôi
Công ty TNHH Robot KGG Thượng Hải là công ty chuyên về lĩnh vực robot tự động hóa và xi lanh điện đã hoạt động được 14 năm. Dựa trên việc tiếp thu và ứng dụng công nghệ Nhật Bản, Châu Âu và Mỹ, chúng tôi tự thiết kế, phát triển và ...Đọc thêm
Chào mừng bạn đến với trang web chính thức của Công ty TNHH Robot KGG Thượng Hải.

Tin tức công ty
-

Đứng đầu




