

Nguyên tắc củađộng cơ bước vít: Vít và đai ốc được sử dụng để khớp nối, và một đai ốc cố định được sử dụng để ngăn vít và đai ốc quay tương đối với nhau, do đó cho phép vít di chuyển theo trục. Nhìn chung, có hai cách để thực hiện phép biến đổi này.
Đầu tiên là chế tạo một rôto có ren bên trong vào động cơ và thực hiệnchuyển động tuyến tínhBằng cách khớp các ren trong của rotor và trục vít, động cơ bước này được gọi là động cơ bước trục vít xuyên thấu. (Đai ốc được tích hợp với rotor của động cơ, trục vít đi qua tâm rotor của động cơ. Khi sử dụng, hãy cố định trục vít và thực hiện chuyển động ngược chiều. Khi động cơ được cấp nguồn và rotor quay, động cơ sẽ di chuyển tuyến tính dọc theo trục vít. (Ngược lại, nếu động cơ được cố định trong khi trục vít được thực hiện chuyển động ngược chiều, trục vít sẽ chuyển động tuyến tính)
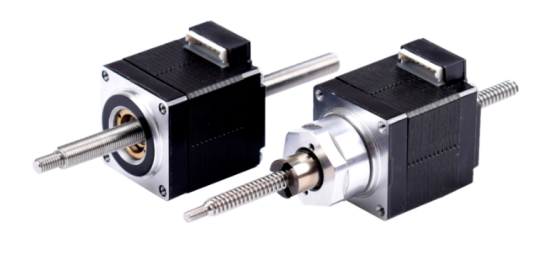
Loại xuyên trục
Thứ hai là lấyvítVới trục ra của động cơ, thông qua đai ốc truyền động ngoài và vít ăn khớp, động cơ bước trục vít truyền động ngoài được kết nối với trục vít bên ngoài để thực hiện chuyển động tuyến tính. Đây là động cơ bước trục vít truyền động ngoài. Kết quả là một thiết kế được đơn giản hóa đáng kể, cho phép chuyển động tuyến tính chính xác trong nhiều ứng dụng được thực hiện trực tiếp bằng động cơ bước trục vít mà không cần lắp đặt liên kết cơ học bên ngoài. (Đai ốc nằm ngoài động cơ và được ghép nối với cơ cấu truyền động. Khi động cơ quay, đai ốc di chuyển tuyến tính dọc theo trục vít.)
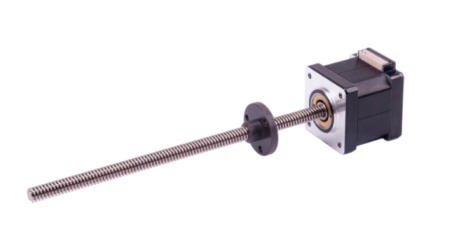
Loại ổ đĩa ngoài
Ưu điểm ứng dụng của động cơ bước tuyến tính xuyên trục:
So sánh các kịch bản ứng dụng trong đó động cơ bước tuyến tính được điều khiển bên ngoài được sử dụng kết hợp vớiđường dẫn tuyến tínhĐộng cơ bước tuyến tính xuyên trục có những ưu điểm riêng biệt, chủ yếu thể hiện ở 3 khía cạnh sau:
1.Cho phép lỗi cài đặt hệ thống lớn hơn:
Nhìn chung, nếu sử dụng động cơ bước tuyến tính dẫn động bên ngoài, độ song song kém giữa trục vít và thanh dẫn hướng có thể dẫn đến hệ thống bị dừng đột ngột. Tuy nhiên, với động cơ bước tuyến tính xuyên trục, vấn đề nghiêm trọng này có thể được cải thiện đáng kể nhờ các đặc điểm cấu trúc thiết kế cho phép sai số hệ thống lớn hơn.
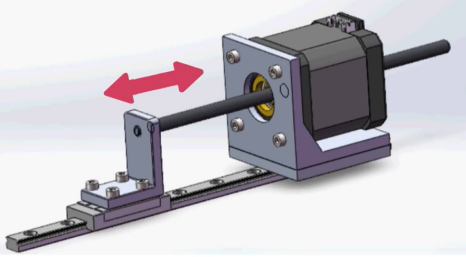
Khi động cơ được cấp điện, đai ốc quay cùng với rôto và trục vít được kết nối với tải trọng bên ngoài và di chuyển theo đường thẳng dọc theo thanh dẫn hướng.
2.Không bị giới hạn bởi tốc độ tới hạn của vít:
Khi chọn động cơ bước tuyến tính dẫn động bên ngoài cho chuyển động tuyến tính tốc độ cao, chúng thường bị giới hạn bởi tốc độ tới hạn của trục vít. Tuy nhiên, với động cơ bước tuyến tính xuyên trục, trục vít được cố định và chống xoay, cho phép động cơ dẫn động thanh trượt của thanh dẫn hướng tuyến tính. Vì trục vít cố định, nên khi đạt tốc độ cao, nó không bị giới hạn bởi tốc độ tới hạn của trục vít.
3.Điều này giúp tiết kiệm không gian cài đặt:
Động cơ bước tuyến tính xuyên trục không chiếm thêm không gian ngoài chiều dài của trục vít nhờ thiết kế cấu trúc tích hợp đai ốc vào động cơ. Nhiều động cơ có thể được lắp trên cùng một trục vít. Các động cơ không thể "đi qua" nhau, nhưng chuyển động của chúng độc lập với nhau. Do đó, đây là lựa chọn phù hợp cho các ứng dụng có yêu cầu không gian khắt khe hơn.
Để biết thêm thông tin, vui lòng liên hệ với chúng tôi tạiamanda@kgg-robot.comhoặc+WA0086 15221578410.
Thời gian đăng: 11-02-2025




